Come trovare la motorizzazione adatta al vostro robot lineare igus®
Marie Olyve | Dicembre 14, 2021
Al giorno d’oggi, molte aziende tendono a sviluppare internamente le proprie soluzioni per la motorizzazione degli attuatori lineari. In igus, possiamo aiutarvi nella scelta e proporvi soluzioni personalizzate…
Oggi, dato che continua a crescere la nostra gamma di robot cartesiani / robot lineari, dobbiamo valutare attentamente la questione dell’effetto che hanno i vari tipi di motorizzazione sulle rispettive forze di azionamento fornite ai vari attuatori lineari.
Prima di tutto vedremo le versioni disponibili e i loro rispettivi vantaggi.
Quali sono gli schemi di motorizzazione disponibili?
Un robot lineare è composto da almeno due assi che si possono muovere, per esempio, in direzione X e in direzione Y. Quando parliamo di azionamento per robot lineari, in igus, ci riferiamo in particolare all’azionamento dell’asse (degli assi) X che presentano alcune caratteristiche speciali.
Motorizzazione laterale
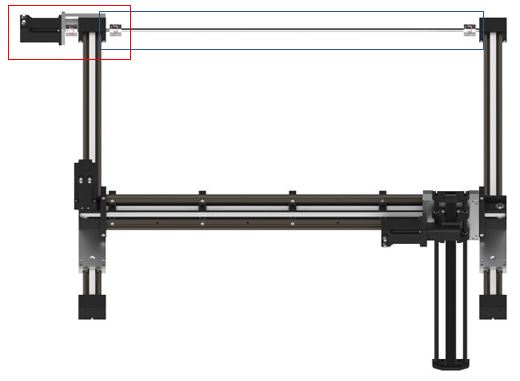
Immagine 2: Motorizzazione laterale
Nell’immagine 2 si vede un robot lineare (3 assi per XYZ) DLE-RG0003.
Cerchiato di rosso vedete il motore, collegato all’asse lineare tramite un giunto elastico. L’asse lineare presenta dei codoli di comando su entrambi lati che vedete cerchiati di blu. L’asse principale mediante il secondo codolo di comando, permette di estendere la movimentazione all’asse parallelo in maniera sincronizzata. In questo modo non avviene alcun impuntamento durante la movimentazione. Per questo sistema servono tre giunti elastici.
Motorizzazione interna asimmetrica
Per le applicazioni più complesse, troverete la nostra soluzione per motorizzazione interna per robot lineari. In genere, il motore viene installato all’interno dei due assi X per azionare il codolo di comando.
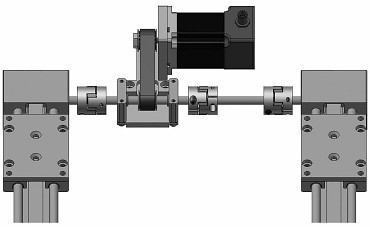
Torniamo però alla nostra questione: quali sono i benefici tecnici di questo tipo di motorizzazione per un robot lineare? Oltre al suo design compatto, questa configurazione permette di ridurre la forza motrice dell’asse X attraverso un’applicazione più uniforme della stessa ed una riduzione della torsione dell’asse principale. Pertanto, con questo schema di motorizzazione è possibile utilizzare un motore più piccolo oppure utilizzare carichi dinamici maggiori rispetto allo schema di motorizzazione laterale. Anche in questo caso, servono tre giunti elastici.
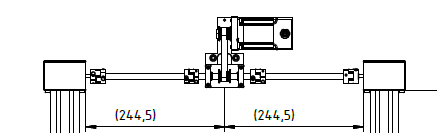
Motorizzazione interna simmetrica
In questa configurazione, come suggerisce il nome stesso, l’azionamento viene posizionato esattamente al centro tra i due assi X, permettendo una trasmissione uniforme della forza motrice a tutti i componenti.
Questi azionamenti sono indicati e vantaggiosi per:
- Carichi elevati
- Elevate dinamiche
- Grande distanza tra gli assi X (torsione dell’asse principale)
- Ottenere un sistema compatto con ridotta dimensione d’installazione
Vi consigliamo di consultare i nostri tecnico-commerciali per selezionare e acquistare la tipologia di motorizzazione più adatta a voi. Tutti i contatti sono qui.
Precisiamo che i sistemi di robot lineari igus possono essere consegnati in tempi molto brevi (anche entro 24 ore!). Per ulteriori informazioni, non esitate a contattare il nostro esperto Edoardo Rivolta!